first of all thank you for your great work on the BEPU physic engine!
I am using BEPU together with Helix 3D toolkit to visualize industrial robots. Here you can see an example Video: https://www.youtube.com/watch?v=x2-fyyBAv20.
All models in the simulation are loaded from STL files. After the files are loaded BEPU ConvexHullShapes are used for collsion detection.
Code: Select all
List<BEPUutilities.Vector3> points = STLLoader(filename);
Vector3 computedCenter;
ConvexHullHelper.RemoveRedundantPoints(points);
var shape = new BEPUphysics.CollisionShapes.ConvexShapes.ConvexHullShape(points, out computedCenter);
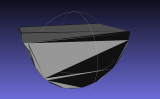
But I also want to use models were the ConvexHullShape does not fit my needs. For example a model of a tooling which is similar to a half cylinder (in reality it is measured from the real tooling so it is just similar to a cylinder). In my simulation the robot should place elements inside and I just want to have a collision event when the robot touches the surface of the tooling. At the moment I get a collision event when the robot moves inside the cylinder (see picture 1 - red means collision). Of course it is obvious that a collision is detected because the ConvexHull of that object looks like the second picture:
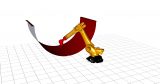
Do you have any suggestions how I could handle objects like the cylinder tooling or a tooling which e.g. looks like a drawer where the robot should place parts inside.
Thank you very much for your suggestions,
Lars