Page 2 of 2
Re: Chrachter Controller
Posted: Thu May 23, 2013 10:01 pm
by mohammadAdnan
thaaaaaaaanks Norbo .
Re: Chrachter Controller
Posted: Fri May 24, 2013 6:41 pm
by mohammadAdnan
Hello teacher Norbo , I am using the latest update and still the bug in the BEUP fired :
BEPU v1.2
chrachter controller the latest version
Re: Chrachter Controller
Posted: Fri May 24, 2013 6:46 pm
by Norbo
I'm not sure what would cause that; try using the latest version of BEPUphysics as well (from the
source download), not just the latest CharacterController. If it still happens, please try to reproduce the issue in the latest BEPUphysicsDemos source download so I can debug it directly.
Re: Chrachter Controller
Posted: Sun May 26, 2013 3:01 pm
by mohammadAdnan
Ok , Norbo thank you , I am 99% to end my game ,we end AI,Physics,Animation,Graphics , but all this is done for one test model !!!!!! Zombie , now after I create tag class for Zombie hold the Zombie ID :
Q1 : Norbo ,what is your advice for Fastest way to create 20 zombie model each with character controller or may be more than 20 zombie model( because if I create more I am scared my game will be slow on some devices ) , i.e using tree or what ??
Re: Chrachter Controller
Posted: Sun May 26, 2013 7:21 pm
by Norbo
On the physics side of things, 20 character controllers should be fine even on phones (especially if stepping is disabled). The engine handles all the acceleration structures for you, so there's nothing tree-like to worry about.
If you're talking about a tree-based graphical occlusion test: you could perform view frustum occlusion testing if you determined it was needed, though hierarchical occlusion testing wouldn't help much compared to brute force frustum testing if you're only dealing with a couple dozen objects.
Re: Chrachter Controller
Posted: Mon May 27, 2013 10:55 pm
by mohammadAdnan
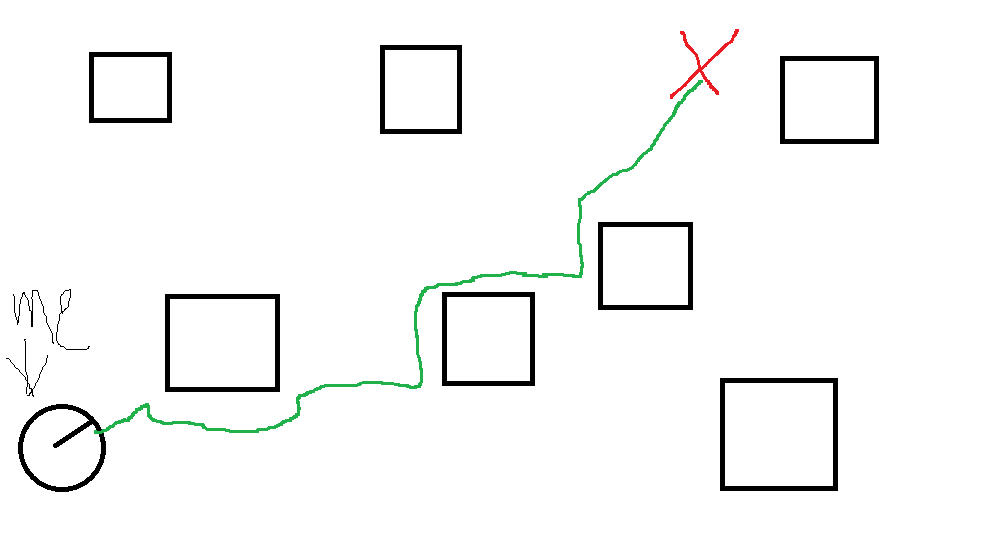
Teacher Norbo , Now My model has complete AI behaviour , but my model surrounded by BEPU character controller have no Collision avoidance while he is moving toward Player ! ,
I think it must be done using rays !!! my teacher Norbo what do you think about Implementing the collision avoidance ? I want to do as shown in the picture :
Note : teacher Norbo I Know my question is large and contain both pathfinding and collision avoidance , but I look at the demos in BEPU and there is path finding !! so I just want steps about the collision avoidance and thanks in advance

Re: Chrachter Controller
Posted: Mon May 27, 2013 11:10 pm
by kavatortank
I do not know if I can say something.
But to make a pathfinding, you need a grid.
I see on your drawing, it's a plane, it greatly simplifies the pathfinding because it is a gate that will represent your 2D world.
How to initialize the grid?
For this it is necessary to choose an arbitrary size for your cells.
Then browse all the objects that will interfere with your pathfinding, so obstacles.
Then, for each obstacle you watch how he takes cells and then convert its position in the grid.
Indeed, we need to move from a position in the world has the grid and vice versa.
When your map is loaded according to all your obstacles, you must use a search algorithm paths.
I board the algorithm A * (A star).
This algorithm will give you the cells to follow to reach your target.
Then it will make a pathfollowing to follow this sequence of cells.
Then there optimizations, such as using a graph or other complex structure to gain speed.
Then, you should know if your mobile obstacles, whether it be at each update or whenever they move, updated their position in the grid.
The grid usually contains int, but to improve performance must limit the number of bit, I suggest you three, which will allow you to encode 8 values.
8 These values correspond to what?
8 These values are arbitrary and will represent states as boxes occupied, free, target box, starting ... This is for you to decide to optimize your algorithm.
A box can be a moving obstacle, as an RN for a different amount than if it encounters a static obstacle behavior.
So, please excuse me for my English.
EDIT :
To optimize my pathfinding, I've used a chunk of system and door because my map was very large, so it will dramatically improve the computing time
Re: Chrachter Controller
Posted: Tue May 28, 2013 7:13 pm
by Norbo
Note : teacher Norbo I Know my question is large and contain both pathfinding and collision avoidance , but I look at the demos in BEPU and there is path finding !! so I just want steps about the collision avoidance and thanks in advance
I should mention that BEPUphysics does not directly support any form of pathfinding. The demo you saw was probably "Path Following", which just shows how to set up and evaluate a curve based on a fixed sequence of control points. True pathfinding would use a separate system; the approach kavatortank outlined would be one option.
I think it must be done using rays !!! my teacher Norbo what do you think about Implementing the collision avoidance ? I want to do as shown in the picture :
For collision avoidance specifically, ray queries can indeed be useful. A brief description of using ray queries for collision avoidance can be found
here. The link discusses cliff avoidance, but the process is conceptually very similar.